˝선박 충돌위험도 추정 및 충돌회피 기술 개발˝
- 조회 : 15569
- 등록일 : 2009-12-02
해양안전방제기술연구부 손남선박사
레이더와 전자해도, AIS(Automatic Identification System) 등 첨단 항해 장비들이 개발되어, 선박의 안전한 운항을 지원하고 있으나, 여전히 선박의 충돌 사고는 줄어들지 않고 있다. 실제로, 항해자가 이들 다양한 항해장비에 전시되는 결과를 확인하고, 충돌 위험을 판단하는 데까지는 많은 주의와 인내력이 요구되며, 충돌 위험을 확인하였다고 하더라도, 올바로 대처하기까지 상당한 시간과 절차가 요구된다.
해양사고의 30% 정도가 충돌사고이며 그 사고의 90%이상이 인적오류에 의해 발생되고 있다는 점도 이를 반증한다.
문제는, 선박간 충돌사고에서 단순한 인적과실이 돌이킬 수 없는 광범위한 해양오염사고로 연결되는 경우가 많다는 점이다. 최근에 발생한 태안 허베이스피릿호 사고의 예를 보더라도, 선박간의 충돌위험도를 자동으로 사전에 인지하여 경보하거나, 충돌회피경로를 자동으로 추정하여 안내하거나 회피기동을 수행할 수 있는 항해지원시스템이 시급함을 알 수 있다.
충돌회피용 항해지원시스템의 핵심은 충돌위험도를 추정하는 기술과 충돌회피를 제어하는 기술을 개발하는 데에 있다.
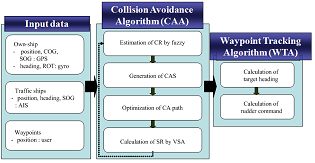
전자는 레이더나 AIS로부터 얻어진 해상의 수많은 선박들의 항행정보를 바탕으로, 어느 선박들이 현재 충돌위험이 얼마나 높은가를 정량화하는 기술이다. 이에 관한 연구는 1980년대 후반 일본의 Koyama, Imazu가 연구를 시작하여, Hasegawa는 충돌여유거리(DCPA, Distance of the closest point of approach)와 충돌여유시간(TCPA, Time to the closest point of approach)을 사용하면서 퍼지이론을 기반으로 충돌위험도를 추론하였다.
후자는 선박이 충돌 위험상황에서 벗어나 다시 원래의 경로로 안전하게 복귀하도록 제어하는 기술로서, 충돌회피경로를 계산하고, 경로를 추종 제어하여야 한다. 이에 관한 연구는 2000년대 초부터, 블록영역이론(Blocking area theory)과 행동공간탐색법(Action space searching) 등의 개념을 기반으로, Furukawa와 Kijima 등에 의해 연구가 수행된 바 있다. 그러나, 대부분의 알고리즘이 수많은 선박이 입출항하는 항만근처의 실제 통항상황을 고려하여, 성능을 입증하지 않았기에, 실제 선박에 설치되어 운용된 사례는 거의 없다.
해양안전방제기술연구부에서는 2006년부터 “네트워크 기반 항만관제 및 항법기술 개발“ 과제를 통해, 선박충돌위험도 추정 및 충돌회피기술을 개발하였다.
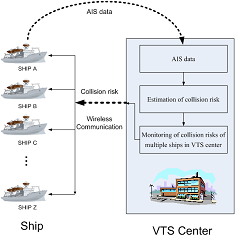
첫째, 충돌위험도 추정을 위해서 그림 1과 같이, 선박들의 AIS 정보가 수집되는 해상교통관제(VTS, Vessel Traffic Service)센터 관점에서, 한두 척의 소수의 충돌위험도가 아닌 수십 척의 선박들의 충돌위험도를 동시에 실시간으로 추정할 수 있도록, 퍼지 기반의 다중선박 충돌위험도 추정 알고리즘을 개발하였다.
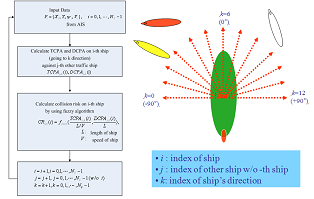
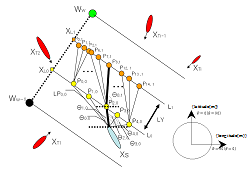
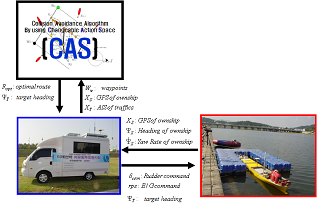
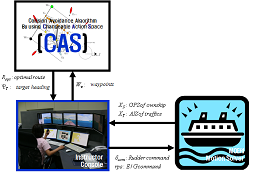
둘째, 선박 충돌회피를 위해서, 시간에 따라 변화하는 행동공간상의 충돌위험을 고려하여, 탄력적으로 회피경로를 탐색할 수 있도록 그림 2와 같이, 가변행동공간탐색법(CAS, Changeable action space searching)을 개발하였다. 행동공간이란 자선과 자선이 목표로 하는 경유점 주위에 Layer, Branch, Node로 구성되는 가상의 공간으로서, 충돌회피를 위한 후보 방향(Alternative direction for collision avoidance) 혹은 후보 경유점(Alternative waypoint for collision avoidance)이 포함된 현재와 미래의 회피공간이라고 할 수 있다.
둘째, 선박 충돌회피를 위해서, 시간에 따라 변화하는 행동공간상의 충돌위험을 고려하여, 탄력적으로 회피경로를 탐색할 수 있도록 그림 2와 같이, 가변행동공간탐색법(CAS, Changeable action space searching)을 개발하였다. 행동공간이란 자선과 자선이 목표로 하는 경유점 주위에 Layer, Branch, Node로 구성되는 가상의 공간으로서, 충돌회피를 위한 후보 방향(Alternative direction for collision avoidance) 혹은 후보 경유점(Alternative waypoint for collision avoidance)이 포함된 현재와 미래의 회피공간이라고 할 수 있다.
가변행동공간이란 설정된 행동공간상의 각 후보 방향 및 각 후보 경유점의 충돌위험성을 실시간으로 계산하되, 충돌위험이 높은 경우에는 정밀하고 조밀하게 회피공간을 구성 및 탐색하고, 충돌위험이 낮은 경우에는 공간의 구성 및 회피경로 탐색의 정도를 낮춤으로써, 회피기동의 탄력성과 효율성을 높인 것이다.
그리고, 개발된 요소기술인 선박 충돌위험도 추정 기술과 선박 충돌회피 기술을 검증하기 위해 다음과 같은 성능검증시험을 수행하였다.
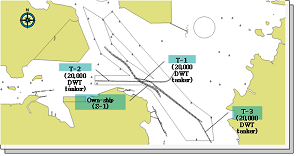
1. 선박 충돌위험도 추정 기술 개발 : 충돌위험도 추정 성능을 검증하기 위해, [그림3]과 같이 울산 VTS센터에서 수집된 25척의 선박의 2시간 동안의 실제 AIS 항행데이터를 이용하여 선박운항시뮬레이터에서 재생시뮬레이션을 수행하였다.
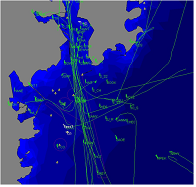
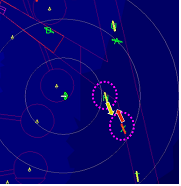
[그림 3] 선박 충돌위험도 추정시험결과 : 25척 울산AIS데이터(좌),
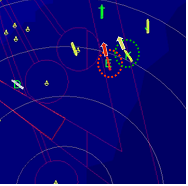
전방조우 선박의 충돌위험도 표시장면(중), Fairway crossing 상황시 충돌위험도 표시장면(우)
2. 선박 충돌회피 기술 개발 : 가변행동공간 탐색법을 이용한 충돌회피알고리즘의 성능검증을 위해 자유항주 모형실험과 선박운항시뮬레이션을 수행하였다.
[그림 4]와 같이, 자유항주 모형실험에서는 대양항해조건을 대상으로 시험을 수행하였는데, 타선박이 전방에서 접근하는 경우, 후방에서 추월하는 경우, 측면에서 접근하는 경우, 그리고 다중선박들이 다방면에서 동시에 접근하는 경우 등 다양한 시나리오에 대해 자동 충돌회피 성능검증을 수행하였다. 그리고, 그림 5와 같이, 선박운항시뮬레이터를 이용한 자동 충돌회피 시뮬레이션에서는, 선박의 조종성능에 많은 영향을 미치는 천수역조건과 해양기상조건을 광양항 해당해역의 실제 조건을 적용하여 수행하였다.
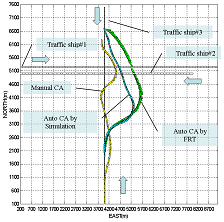
광양항 대상 4척 Fairway crossing 충돌회피 시뮬레이션 결과(우)
이상과 같이, 지난 3년에 걸쳐 개발된 상기 기술들은 해상교통연구분야의 핵심 기술로서, 이를 바탕으로 향후 해상교통관제(VTS) 고도화 및 지능형 선박운항지원시스템 구축을 위해 지속적인 개발을 수행할 계획이다.
해양안전방제기술연구부에서는 차세대 항만관제시스템과 무인선에 관한 연구를 수행중이며, 이상에서 개발된 기술들과 접목하여 지속적인 연구개발을 추진한다면, 하루가 멀다하고 발생되는 해상충돌사고를 획기적으로 줄임과 동시에 선박들이 안심하고 항만을 출입항할 수 있는 안전한 바다를 만들 수 있을 것으로 확신하며 연구에 최선을 다하고 있다.
2009-12-02
- 담당부서 :
- 홍보문화실
- 연락처 :
- 051-664-9071
- 최종수정일 :
- 2024-01-31