국산 수중건설로봇 ‘복합 실증센터’ 착공으로 연구개발 가속화
- 조회 : 14720
- 등록일 : 2015-10-02
국산 수중건설로봇 ‘복합 실증센터’ 착공으로 연구개발 가속화
해양산업의 발전으로 해양 플랜트와 해양에너지, 이산화탄소 해양 포집 및 저장 장치, 해상풍력 등 해양 구조물 건설 등이 주목받고 있다. 또한 해양 구조물이 점차 대수심 조건으로 옮겨가는 추세에 따라 수중건설로봇이 필수 기술로 떠오르고 있다.
|
그림 1. 다양한 종류의 해양 구조물 |

선진국은 이미 다양한 수중건설로봇을 현장에 투입하고 있지만, 우리나라는 아직까지 관련 기술이나 장비를 수입하거나 임대해 사용하고 있다. 이에 따라 2013년부터 2019년까지 총 813억 원의 연구개발비를 지원받아 한국해양과학기술원 해양개발용 수중건설로봇사업단 주도로 독자적인 수중건설로봇을 개발 중이다.
수중건설로봇 개발을 위한 필수 시설 ‘수중건설로봇 복합 실증센터’의 착공식이 지난 9월 2일 경북 포항시 영일만 3일반산업단지 부지에서 열렸다. 이곳은 영일만항에 인접하여 실제 바다에서 수중건설로봇을 시험하기가 용이하고 KTX 포항역 및 고속도로와 인접해 접근성이 좋다. 또한 주변 해양환경 연계 연구가 가능해 다양한 시너지 효과가 기대되는 지역이다.
수중건설로봇 복합 실증센터는 경상북도와 포항시가 170억 원을 들여 9,910㎡의 부지에 지하 1층, 지상 4층 규모로 수중건설로봇 성능 실험을 위한 수조와 연구지원 시설로 구성된다. 수조는 길이 35m, 너비 20m, 수심 9.6m의 3차원 수조와 길이 20m, 폭 5m, 수심 6.2m의 회류수조가 구축되며 수중 환경 재현을 위한 최대유속 3knots의 조류발생장치 및 대형 수중건설로봇(장비) 투입·회수를 위한 30ton 호이스트, 작업대차, 수중 구조물 등이 설치된다.
|
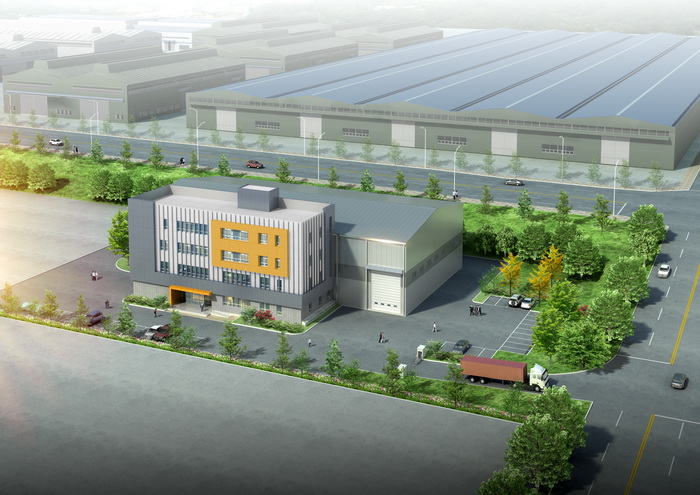
그림 2. 수중건설로봇 복합 실증센터 착공식이 9월 2일 포항에서 열렸다. |

|
그림 3. 수중건설로봇 복합 실증센터 조감도. 9,910㎡의 부지에 지하 1층, 지상 4층 규모로 지어진다. |
2019년까지 수중건설로봇 3종 연구개발
수중건설로봇 복합 실증센터에서 목표 수심 500m ~ 2500m 내외의 해양 구조물 건설을 위해 개발 중인 수중건설로봇(장비)의 성능 검증이 이루어진다.
수중로봇은 통신을 하고 전기를 공급하는 선의 유무에 따라 ROV(Remotely Operated Vehicle)와 AUV(Autonomous Underwater Vehicle)로 나뉘는데, ROV는 선을 통해 원격 조종하며 다양한 작업을 하게 할 수 있지만, AUV는 선 없이 스스로 알아서 해저를 스캐닝하게 할 수 있는 지능형 로봇이다.
수중건설로봇사업단 장인성 단장은 “배터리가 필요 없이 전기와 유압으로 구동되는 ROV는 시간에 무관하게 쓸 수 있다”며 “수중건설로봇도 ROV 형태로 개발 중”이라고 설명했다.
수중건설로봇사업단은 유영식 ROV와 트랙기반 수중로봇 등 총 3가지 종류의 수중건설로봇을 연구 개발하는데, 유영식 ROV는 중성 부력을 이용해 떠다니며 자유롭게 이동하는 방식으로 경(輕)작업용 ROV, 중(重)작업용 ROV로 구분해 개발한다. 트랙기반 ROV는 무한궤도가 달려 있어 비교적 단단한 지반 조건에서 굴착기처럼 바닥을 이동하며 작업하게 된다.
|
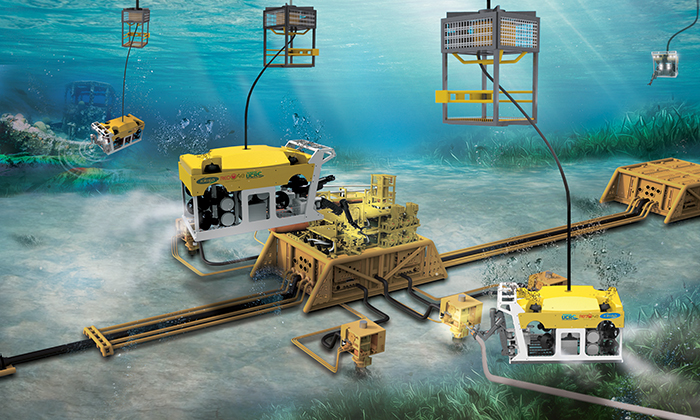
그림 4. 경작업용 ROV(왼쪽), 중장업용 ROV(가운데), 트랙기반 ROV(오른쪽) |

먼저 제1 핵심과제인 유영식 경작업용 ROV는 수중 용접 및 수중 구조물을 유지관리하는 데 목적이 있다. 이 과정에서 중작업용 ROV와 트랙기반 ROV에 공통으로 들어가는 수중 운용 관련 세부기술, 로봇팔(manipulator) 제작 기술, 원격 운용 기술, 정밀제어 기술 등을 개발하는 한편, 개발된 기술의 일부분은 다른 핵심과제와 공유하게 된다.
제2 핵심과제인 중작업용 ROV는 해저의 땅을 파고 해저케이블을 매설하거나 수중 중량 구조물 설치 등의 작업을 하게 된다. 최대 2,500m까지 작업이 가능하며, 워터젯을 이용하여 최대 3m 굴착을 할 수 있다. 중성부력을 바탕으로 하기 때문에 아주 연약한 지반에서도 작업이 가능하며, 공기 중 무게는 약 15~20톤 정도가 예상된다.
마지막 트랙기반 ROV는 아주 단단한 지반에서 해저케이블이나 파이프라인 매설이 가능하며, 연암과 같은 암반 파쇄에도 활용될 수 있다. 지반 조성을 위한 다양한 툴을 부착할 수 있고 비교적 단단한 해저면에서 트랙을 활용할 수 있어 높은 정확도로 수중 이동 중작업을 수행할 수 있을 것으로 예상한다. 공기 중 무게는 약 30톤 정도를 예상하고 있다.
|
그림 5. 수중건설로봇사업단의 핵심별 로봇에 대한 적용 개념도. ①경작업용 ROV(1 핵심과제), |

장 단장은 “해외에서 수중건설로봇을 임대하는 비용은 부르는 게 값이라, 1대를 1달간 빌리는 데 개발비와 비슷한 비용을 요청하기도 한다”며 “하지만 한국에서 수중건설로봇을 개발하고 있으며 그 기술을 확보하고 있다는 사실만 알려져도 그 비용이 크게 떨어질 수 있다”며 우리나라가 수중건설로봇 개발기술을 확보해야하는 중요성을 설명했다.
|
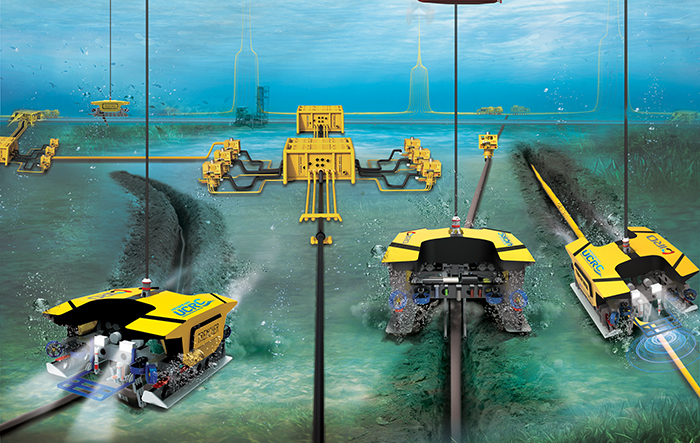
그림 6. 경작업용 ROV 적용 개념도 |
|
그림 7. 중장업용 ROV 적용 개념도 |
|
그림 8. 트랙기반 ROV 적용 개념도 |

- 담당부서 :
- 홍보문화실
- 연락처 :
- 051-664-9071
- 최종수정일 :
- 2024-01-31