해양관측분야 무인화 시스템 개발 및 활용
- 조회 : 14040
- 등록일 : 2015-10-02
최근 해양관측 분야에 이용되는 무인화 시스템은 수중, 수상의 무인 플랫폼의 다양한 형태로 매우 빠르게 개발되고 있다. 무인 플랫폼 개발은 그 활용 범위에 따라, 크게 수중작업용 원격조정 무인잠수정(Remotely Operated Vehicle; ROV), 수중탐색 및 관측 용도의 수중무인잠수정(Autonomous Underwater Vehicle; AUV), 그리고 수상에서 운용되는 무인수상선(Unmanned Surface Vehicle; USV)으로 나뉘지만, 활용 목적을 따질 때 그 경계가 모호한 경우도 있다. 그 외에 활용 주체에 따라 해양방위분야, 해양탐사/관측분야, 그리고 건설 분야라 할 수 있는 수중작업분야로 나누어 질 수 있다. 본 내용에서는 해양방위분야 및 해양관측분야에 이용되는 무인화 시스템의 개발동향 및 활용 동향에 대하여 언급하고자 한다.
무인탐사시스템의 주요 형태
1) 원격조정 무인잠수정(ROV)
수중작업용 ROV는 모선에 연결된 케이블로 전원공급과 통신이 가능한 무인플랫폼으로 이동범위가 제한적이지만 수중건설, 케이블 매설, 수중작업, 기뢰탐지 등 다양한 분야에 활용되고 있다. 국내의 경우, 한국해양과학기술원에서 해미래 ROV를 개발한 이후 기뢰탐색용 MDV(Mine Disposal Vehicle), 다관절 크랩스터, 수중건설로봇이 개발되거나 개발 중에 있고, 다양한 연구개발이 연구소와 학계를 중심으로 진행되고 있다.
|
| 그림 1. (좌) 해미래, (중) MDV, (우) Crapster |

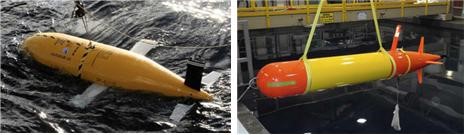
2) 수중무인잠수정(AUV)
AUV는 수중에서 자유로운 이동이 가능한 무인탐사체로 흔히 어뢰형상처럼 생겼다. AUV는 직선이동을 통하여 해저면의 다양한 정보를 획득할 수 있는 장점이 있으나, 탑재된 배터리 운용시간이 한정되어 있어 장기간의 관측에는 적용하기가 어려웠다. 그러나 최근 리튬배터리와 연료전지 등 배터리 기술이 발달함에 따라 장기간 운용이 가능하게 되었다. Side Scan Sonar, Multi-Beam Echo Sounder 등 해저면 탐사장비와 수중음파카메라 등을 장착운용함으로써 기뢰와 같은 해저 접촉물을 탐지하거나, 북극 얼음층 밑의 해저면 탐사 등에 이용되고 있다. 국내에서는 한국해양과학기술원에서 개발된 AUV인 “이심이”를 시작으로 한화에서 개발한 한화 AUV, 이심이 6000, 한화탈레스(이전 삼성탈레스)의 Mine Killer-Boto 외 연구소와 학계의 다양한AUV 개발이 진행되고 있다.
|
| 그림 2. (좌상) 이심이, (우상) 이심이6000, (좌하) 한화 AUV, (우하) Mine Killer Boto |

3) 무인반잠수정(Semi-Submersible AUV)
ROV와 AUV의 단점을 보완하기 위하여 개발된 반잠수정은 수상에 공기흡입구를 노출하고 하부에는 케이블로 연결된 AUV와 같은 작업선으로 구성되어 있다. 공기흡입구로 내연기관을 구동하여 동력을 발생시키며 하부의 케이블로 연결된 AUV가 수중탐색을 수행한다. 특히 통신 안테나가 수상에 노출되어 있어 육상의 운용모선과 통신이 가능하다. 국내에서는 개발되지 않았지만 미국과 캐나다에서는 기뢰탐지용으로 실전배치하여 활용하고 있다.
|
| 그림 3. (좌) 캐나다 ISE DORADO, (우) 미국 Lockheed Martin RMMV |

4) 무인수상정(USV)
무인수상정은 여러 국가에서 오랜 기간 동안 연구되었으며, AUV와는 다르게 내연기관을 사용할 수 있어 다른 플랫폼과는 비교할 수 없을 만큼 장기간 운용이 가능하다. 군사적인 목적의 실용화가 가장 빨리 이루어진 플랫폼으로서 다양한 무장을 통해 전투가 가능한 플랫폼이 다수 개발되어 실전에서 운용되고 있다. 과학기술용으로도 소형의 무인 수상정들이 개발되어 활용되고 있으며, 국내에서는 최근 들어 해양방위용으로 국방과학연구소와 선박해양프랜트연구소(KRISO)에서 연구가 진행되고 있다.
|
| 그림 4. (좌) 미국 해군 Seafox, (우) 이스라엘 Rafael사 Protector |

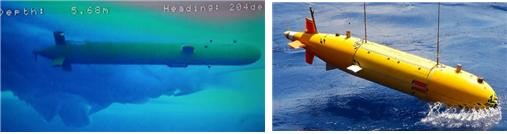
5) 수중글라이더(Underwater Glider)
수중글라이더는 2000년대 초반 미국에서 개발된 수중운동 플랫폼으로서 이동속도는 느리지만(일반적으로 1.0노트 이하) 1,000~4,000km에 이르는 장거리, 장기간 운영이 가능하다. 특히 깊은 수심을 오르고 내리는 이동 특성으로 인해 장기적인 수중에서의 수심별 수온 관측 등의 해양물리관측 용도에 매우 유용하다.
|
| 그림 5. (좌) Teledyne Slocum, (중) Bluefin Spray, (우) Konsberg Seaglider |

6) 무인파력선(Autonomous Wave Propulsion Vehicle)
1980년대 연구가 진행되었던 파력선은 파도의 힘으로 추진하는 것으로, 1990년대 말을 지나며 퇴조하였다가 2000년대 들어 Liquid Robotics사의 Wave Glider가 개발됨으로써 무인수상선으로 각광을 받기 시작하였다. 제작사가 무인파력선의 태평양 횡단을 성공시킴에 따라 장기 운용 능력이 입증되었고, 무인 파력선을 이용한 각종 센서융합 기술에 의한 군사적 활용뿐 아니라 다양한 해양탐사에 응용되고 있다. 최근에는 영국에서도 무인파력선 AutoNaut이 개발되어 시험 운영 중에 있다.
|
| 그림 6. (좌) 미국 Liquid Robotics사 Wave Glider, (우) 영국 MOST사 AutoNaut |

해양관측용 무인 시스템 개발동향
최근 배터리 기술의 발전은 장기간에 걸쳐 넓은 해역을 무인 플랫폼을 이용하여 자율 이동식 해양관측이 가능하도록 만들었다. 최근에는 장거리 이동 및 여러 종류의 탐사를 동시에 수행할 수 있는 대형 AUV 개발이 추진되고 있다. 이러한 경향은 2000년대 들어 개발된 장거리 AUV, 수중글라이더와 무인파력선을 중심으로 계류부이 및 ARGO 뜰게를 이용한 해양관측 분야를 대체할 신기술로써 그 기술 개발이 꾸준히 이루어지고 있다. 이러한 새로운 무인화 관측 플랫폼들은 자율제어를 수행하면서 장기간 운용할 수 있는 장점이 있고, 해양과학 분야뿐 아니라, 해양방위 목적으로도 크게 주목받는 등, 그 활용도가 점차 증가되고 있다.
1) 대형 AUV
AUV의 일반적인 한계로 알려진 이동거리 및 작업능력의 한계를 극복하기 위해 여러 장치를 탑재한 대형의 AUV가 개발되고 있다. 대표적으로는 국내의 KRISO에서 개발한 이심이6000, 캐나다 ISE의 Explorer, 영국 NOC의 Autosub6000 등이 있는데, ISE Explorer는 2010년 북극해역에서 약 110km 거리에 대한 멀티빔 측정을 수행하기도 하였다.
|
| 그림 7. (좌) 빙하 밑을 이동하고 있는 캐나다 ISE Explorer, (우) 영국 NOC AutoSub6000 |
2) Long Range AUV
수중글라이더와 같이 장거리, 장기간 이동하여 해양관측을 수행할 목적으로 장거리 관측용도의 AUV들이 개발되고 있다. 이러한 AUV들로 영국 NOC의 Autosub LR과 미국 MBARI의 Tethys AUV 등이 있으며, AutosubLR의 경우 2kt 6,000km, Tethys의 경우 2kt 1,800km를 목표로 개발이 진행되고 있다.
|
| 그림 8. (좌) 영국 NOC Autosub LR AUV, (우) 미국 MBARI Tethys AUV |
3) 수중글라이더
수중글라이더는 2000년대 초반 미국에서 개발된 이후, 여러 나라에서 다수의 수중글라이더가 개발되었다. 수중글라이더는 그 속도가 0.5~1.0kt로 느리지만 1,000m~1,500m의 수심까지 오르내리며 이동하기 때문에 수직공간을 관측하기 위한 광역 해양관측용으로 적합하다. 그리고 이동시 소음이 거의 없기 때문에 군사적인 용도로도 활용 및 개발되고 있다.
미국 룻거스 대학에서는 Slocum 수중글라이더로 대서양 횡단에 성공하였다. 그리고 미군에서는 Slocum 글라이더가 LBS-G의 명칭으로 LBS-AUV와 함께 해군무기체계에 포함되어 해양관측에 의한 환경정보 획득을 위해 사용되고 있으며, 대형 전익형(Fly Wing) 수중글라이더인 Liberdade ZRay 수중글라이더도 잠수함탐지를 위해 개발되었다.
국내에서는 한국해양과학기술원이 수행한 200m급 수중글라이더에 대한 설계 및 구동 제어 기술을 확보하여 검증시제를 제작하여 해상시험을 완료한 상태이다.
|
| 그림 9. (좌상) 미 Exocetus Costal Glider, (중상) 프랑스 ACSA SeaExplorer, (우상) 미국 Teledyne Marine System Slocum G2, (좌중) 미국 Liderdade ZRay, (중중) 일본 JAMSTEC Tsukuyomi, (중우) 중국 Tienjin Univ. Petrel, (좌하) 미국 Deep Glider, (우하) 미국 WHOI Slocum Thermal E-twin |

4) 무인파력선(Unmanned Wave Propulsion Vehicle)
70~80년대 각광을 받아온 파력선 기술을 바탕으로 미국의 Liquid Robotics사가 최초의 무인파력선인 Wave Glider를 개발하였고, 미국서부에서 호주까지의 태평양 횡단이동에 성공하였다. 무인파력선은 태양광 발전을 하기 때문에 부이와 같이 상시 관측이 가능하며 자율 또는 제어이동이 가능하다. 이러한 장점으로 인해 미 해군에서는 일찍이 SHARC라는 명칭으로 해군무기체계에 포함시켰으며, 그 외 다른 나라에서도 속속 시스템을 도입하여 운용에 대한 평가를 진행 중에 있다. 이어 영국에서는 Autonaut라는 무인파력선이 개발되어 시험에 성공하였고 다양한 장비를 장착하여 시험운영 중에 있다. 그밖에 중국과 일본의 경우 2013년부터 학계를 중심으로 연구와 개발이 동시에 진행되고 있다.
|
| 그림 10. (좌) 중국 Shenyang대 무인파력선, (우) 일본 Tokai Univ. 무인파력선 |

무인탐사장비, 어떻게 활용할까?
가장 대표적인 활용분야가 해양방위다. 해양방위용으로 활용되는 무인수상선(USV)은 크게 해상전투, 대기뢰전의 탐색용도, 대잠수함전과 같은 감시정찰용으로 그 활용 방법을 나눌 수 있다. 이미 많은 국가에서 해상전투를 위한 무인수상선(USV)은 개발하였고, 실전배치하여 운영되고 있다. 국내에서는 한국해양과학기술원-선박해양플랜트연구소를 중심으로 연구개발이 진행되고 있다. 기뢰 탐색용 ROV를 기반으로 한 MDV(Mine Disposal Vehicle)의 개발은 한화탈레스(이전 삼성탈레스)의 AUV인 Mine Killer-Boto가 개발 진행되었고, 최근에는 기뢰탐색용의 AUV를 개발하여 평가를 진행 중에 있다. 미국에서는 다양한 무인수상정, 반잠수정, AUV, 수중글라이더 등을 해양방위를 위한 무인화체계로 활용하고 있다.
대잠수함전으로 대변되는 감시정찰의 용도로 미국에서는 AUV(LGS-AUV)와 수중글라이더(LBS-G), 웨이브 글라이더(SHARC)등이 활용되고 있고, 해군의 작전 환경 파악을 위한 수온, 음속도 측정 등과 같은 다양한 해양환경정보 관측을 위한 목적으로 활용되고 있다. 국내에서는 한국해양과학기술원에서 수중글라이더와 Wave Glider를 도입하여 해양관측을 위한 활용 연구 및 수중글라이더 개발을 수행하고 있다.
|
| 그림 11. 해양방위연구센터가 개발한 수중글라이더 시험시제 및 해상시험 |

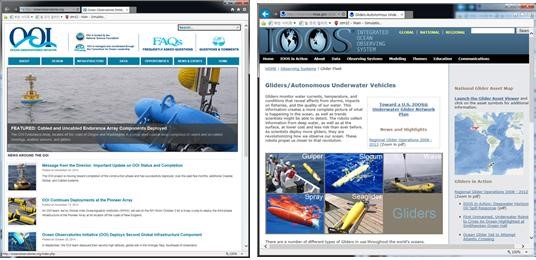
무인탐사정은 관측용으로도 많이 활용된다. 최근의 해양관측은 세계 여러 나라가 지역적 또는 전 지구적인 해양관측을 위해 다양한 국제기구나 프로그램을 통해 진행되는 경우가 대부분이다. 이러한 해양관측 프로그램에 소속되는 각 기관들은 AUV, 수중글라이더 및 Wave Glider 등 다양한 무인플랫폼을 활용하여 해양관측을 체계화하기 위한 연구를 활발히 수행하고 있다. 미국은 2007년에 시작된 OOI(Ocean Observation Initiative)를 통해 저비용 무인체계를 이용하여 해양관측 플랫폼을 통합하려는 노력을 진행하고 있고, NOAA를 중심으로 IOOS(Integrated Ocean Observing System)을 구축하여 다수의 수중글라이더 및 Wave Glider 기타 해양관측장비를 활용하여 통합 해양관측망을 구축하고 있다.
|
| 그림 12. (좌) 미국 OOI(Ocean Observation Initiative, (우) 미국 NOAA 산하 IOOS(Integrated Ocean Observing System) |
유럽에서는 유럽연합 9개 회원국 19개 연구기관의 공동참여로 GROOM(European Glider Ocean Observing Management) 해양관측 프로그램을 수립하고 수중글라이더를 이용한 해양관측의 다양한 연구를 진행하고 있다. 일본에서는 적도 관측용 TAO/TRITON 부이를 수중글라이더로 대체하기 위한 계획과 그 진행이 이루어지고 있다. 영국 NOC(National Oceanography Centre)에서는 다수, 다종의 AUV와 수중글라이더, 무인파력선들을 통합 활용하여 다양한 해양관측연구를 수행하고 있다.
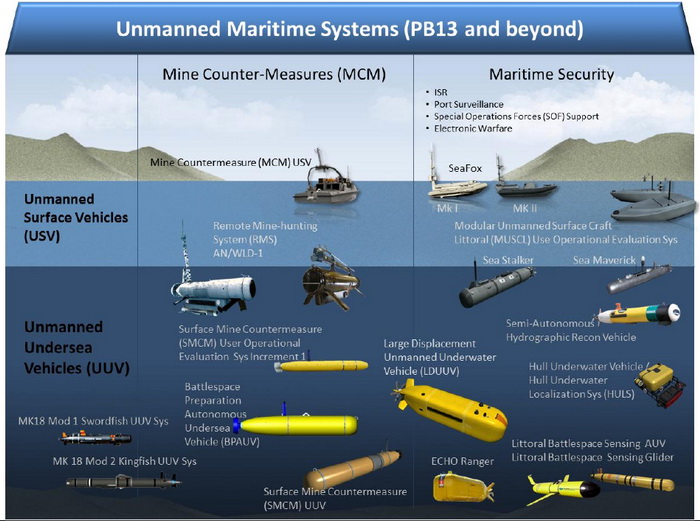
부상하는 시장
2013년 미 국방성은 『무인체계 통합보고서(USIR)』를 통해 무인자율수중체계가 필요한 17개 분야를 발표하였고, 최우선적으로 정보?감시?정찰(ISR - Intelligence, Surveillance and Reconnaissance) 분야에 무인자율수중체계가 필요하다고 명시하고 있다. 이 문서에 의하면 미 해군은 무인자율수중체계 관련 연구개발, 구매, 유지보수를 위해 2014년부터 2018년까지 19억 달러(약 2조 원)가 투입될 예정이다.
|
| 그림 13. DoD-Unmanned Systems Integrated Roadmap,FY2013-2038 상의 수중무인시스템 |
|
| 그림 14. 국방성 무인체계 중기계획 예산안 |
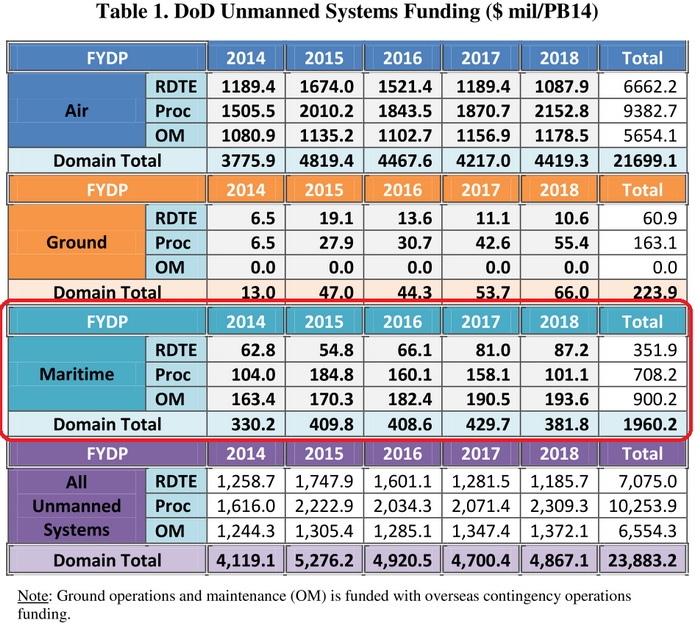
미 해군은 LBS-G 프로그램으로 알려진 연안전장환경 관측용 수중글라이더 연구 및 개발사업에 2,990만 달러를 투입할 계획이며, 북대서양조약기구는(NATO)는 수중글라이더 연구 및 개발을 위해 850만 유로를 투입할 계획이다. 그에 따라 러시아의 경우도 2017년까지 470만 달러를 투입 수중글라이더의 개발, 운영, 구축할 예정이다.
무인탐사정 시대, 어떻게 대비하나?
무인플랫폼은 미국을 중심으로 개발과 투자가 활발하게 이루어졌으나, 최근 영국, 일본, 중국 등이 관련 투자를 시작하고 있으며, 연구 개발된 각국의 무인 플랫폼을 이용한 해양관측 또한 무인화 해양탐사 자원을 서로 연계하고 표준화하기 위하여 기구 및 프로그램들이 제안되고 구체화되고 있는 추세이다. 최근 들어 요소기술의 기술 특허 등 속속 도래하는 관련 기술의 특허 만료와 배터리 기술 발전 등을 감안하여 볼때, 전 지구 해양을 대상으로 한 연속 해양탐사를 체계적이고 조직적으로 장기간 수행할 수 있는 무인화 플랫폼의 개발이 다양한 형태, 다양한 목적으로 급속하게 발전할 것으로 전망된다. 특히 관측용도의 해양무인 플랫폼들은 이동 및 운영시간이 지속적으로 증가할 것이며, 해양방위 및 해양관측 분야에서 기존에 사용되던 방식을 상당 부분 변화시킬 것으로 전망된다. 해양연구 측면에서도 이러한 기술 부분의 투자와 특히 우리나라가 우위를 점하고 있는 통신, IT 기술 등과 융합 활용할 수 있는 분야의 플랫폼 개발 연구를 통해 높은 부가가치를 갖는 다양한 기술을 개발보유 할 수 있게 될 것이다.
글 | 안전·방위연구본부 이용국 본부장